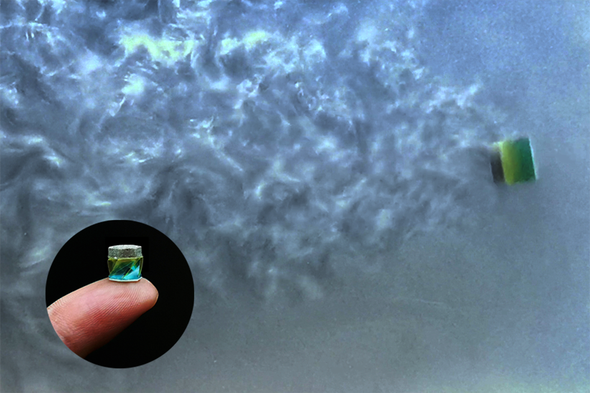
A new kind of hollow, pea-sized robot can roll, flip and jump to navigate its surroundings. It can transition from dry surfaces to pools of liquid with ease, making it fully amphibious. Its ability to use different types of motion in multiple environments—while carrying a cargo—sets it apart from other wee machines, most of which can only move in a single way. The new bot’s versatility also makes it uniquely adept at working its way through, over and around obstacles. One day its small size and multifunctionality might let it navigate the complex environment of a human body and deliver a targeted payload of medicine to a patient in need.
The robot’s ability to overcome physical obstacles stems from a unique design: creased in an origami arrangement called a Kresling pattern and topped with a magnet. The Kresling pattern looks like a series of stacked right triangles wrapping around the robot’s belly, making it resemble a ridged and slightly squashed cylinder. The ridges also give it a propellerlike shape that helps it move through liquid. “What we really wanted to see is whether we could integrate the geometric features with the foldability of the origami design to achieve effective navigation of the [robot] and also use its foldability mechanism for drug delivery,” says Renee Zhao, an assistant professor of mechanical engineering at Stanford University. She and her colleagues describe the robot in a paper published on Tuesday in Nature Communications.
A small hole at one end offers access to the robot’s hollow center, which can hold a small payload: an object or some liquid. A magnet at the other end allows the machine to be controlled wirelessly—all the operator needs is their own magnet. The kind of magnetic field the researchers used is similar to the type generated by a magnetic resonance imaging (MRI) machine, Zhao explains. “I think one strategy would be developing this robot so that it’s compatible with the MRI system,” she says, in order to control it while a patient is in the imaging machine. Developing a new kind of device that could generate and manipulate the correct kind of magnetic field is also an option, Zhao adds, but it would need to incorporate medical imaging like an MRI machine does to track the robot’s location within the body.
Some versions of the new robot have a second magnet on the opposite side of its soft, cylindrical structure. This makes the bot pumpable. An operator controlling the magnetic field generates a small amount of rotational force between the magnets, which squeezes the robot’s thin plastic body. Doing this repeatedly can pump liquid from the robot’s belly to its surroundings.
The device can do more than deliver liquid payloads. Its propellerlike shape means an operator can make it spin by applying a rotating magnetic field—and thereby push it through liquids. This spinning also generates enough suction to pull objects into the robot’s hollow belly. And as it swims, the spinning motion holds the sucked-up payload inside. When the robot reaches its destination, the operator can stop the spinning, and the bot will dump out whatever it has picked up. This allows delivery of small solid payloads to targeted locations.
In theory, this process could carry liquid or solid medications directly to specific locations in a body—possibly in the digestive tract, for example. The robot was designed with materials that are soft enough to avoid tissue damage, Zhao says. Even the magnet is squishy, she points out. The team made it by embedding tiny glass beads and metal nanoparticles in pliable plastic. The researchers demonstrated that the robot can maneuver through the dry environment of an empty pig’s stomach, as well as one filled with liquid. They controlled the robot’s general trajectory, but there was no need to tell it how to maneuver around small obstacles: the magnetic field told it to move in a certain direction, and it rolled, tumbled or performed whatever other movement it took to take that path. If the robot encountered a larger obstacle, its operator could briefly increase the magnetic field’s strength to make the bot jump. If it ran into a deep pool of liquid, the operator could change the magnetic field so the device would swim.
This multifunctionality in such a simply designed robot surprised Siyi Xu, a postdoctoral robotics engineer at the Harvard Microrobotics Laboratory, who was not involved in the new study.* “It is very interesting to see them achieve many of these abilities into one integrated [design],” she says. Xu adds that many similar small robots only specialize in one kind of motion, be it walking, crawling, swimming or flying.
The new, more adept origami design could be like a blueprint for future tiny robots, Zhao says. That could open up more applications. “These functionalities are not limited to a specific disease or a specific application,” she says. She and her lab are now considering how these robots might be made even smaller and able to travel in the bloodstream. Slightly larger bots could carry tiny cameras or forceps, which would be useful for minimally invasive medical procedures. Zhao plans to continue exploring similar devices, adding even more capabilities to these microrobots while maintaining their simplicity of design.
*Editor’s Note (6/15/22): This sentence was edited after posting to clarify Siyi Xu’s position at the Harvard Microrobotics Laboratory.
 Rights & Permissions
Rights & Permissions
